您现在的位置是:首页 > 变频技术 > 变频技术
方波电流型BDCM(无刷直流电动机)交流伺服系统举例
![]() 来源:艾特贸易2018-04-28
来源:艾特贸易2018-04-28
简介本文将以硬件控制为基础,介绍 AC 交流伺服系统的典型实例,使读者对 AC 私服系统有一个整体的认识。 图 9-5 BDCM 交流伺服系统框图 1. 系统结构和工作原理 方波电流型 BDCM 交流伺服
本文将以硬件控制为基础,介绍AC交流伺服系统的典型实例,使读者对AC私服系统有一个整体的认识。

图9-5 BDCM交流伺服系统框图
1.系统结构和工作原理
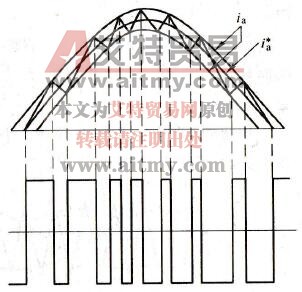
方波电流型BDCM交流伺服系统的结构框图如图9-5所示。图中PE为光电编码器,用以检测速度和磁极位置。编码器检测部分输出与磁极位置相对应的脉冲信号Uu、 u、Uv、v、Uw、w,它们之间的相位关系如图9-6所示。由图可见,信号Uu、Uv、Uw之间相位差为120°。
u、Uv、v、Uw、w,它们之间的相位关系如图9-6所示。由图可见,信号Uu、Uv、Uw之间相位差为120°。

图9-6 磁极位置信号的相位关系
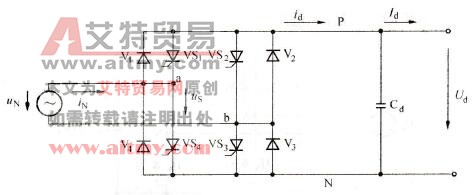
驱动无刷直流伺服电动机的逆变器和一般通用变频器相似,是由功率晶体管组成全波桥式电路,逆变器供电给Y接法的电动机定子绕组,如图9-7所示。逆变器中的晶体管由基极驱动电路控制导通,如果导通的顺序为V1,V2,V3,…,V6,每只晶体管导通持续120°,则电动机定子电流iAx、iBy、iCz亦为相隔120°的矩形波,如图9-8所示。由图可见,任何时候电动机只有两相绕组通电。转子转动一周,定子电流有6种不同状态,即
①-iAx+iBy
②-iAx+iCz
③-iBy+iCz
④iAx-iBy
⑤iAx-iCz
⑥iBy-iCz

图9-7 逆变器与电动机定子连接

图9-8 电动机定子电流波形和元件导通顺序
与定子电流的6种不同组合状态相对应,定子磁场也对应为6种不同的空间位置,如图9-9所示。定子在空间的合成磁通是由三相电流在该时的组合而形成的,但定子电流处于何种状态(6种状态之一)是受转子磁极位置检测来控制的。因而对于转子在空间的某位置,必定有两个定子绕组通电。在图9-9中,假设定子磁通处于状态②,即-iAx+iCz,由于要求定子磁通矢量和转子磁通应实现正交,则转子磁通应处于图中OC方向,二者夹角为90°。转子磁极受力推动转至Od位置,这时根据磁极位置检测信号并做出逻辑判断后,按图9-8所示的导通顺序,切断-iAx,接通-iBy,使定子磁通处于③状态。依此类推,电动机转子按①②③④⑤⑥状态顺时针方向转动。
2.多路乘法器
图9-5中的多路乘法器是将转子磁极位置信号转换成电流指令相位的一种调制电路,可以认为它是一种电动机旋转坐标变换器。它是直流无刷电动机伺服系统实现自控式变频的关键部件。
装在电动机转子轴上的光电编码器输出两组脉冲。一组是互差120°的三相脉冲,即Uu,u,Uv、v和Uw、w,如图9-6所示,它代表转子磁极的实际位置;另一组是相互正交(相位差90°)的A、 ,B、
,B、 和Z、
和Z、 脉冲信号,即如图9-8的电流脉冲。通过逻辑运算得出基准定子电流的相位信号,使定子合成磁通与转子磁极磁通始终保持在60°~120°范围,从平均意义看二者实现正交。
脉冲信号,即如图9-8的电流脉冲。通过逻辑运算得出基准定子电流的相位信号,使定子合成磁通与转子磁极磁通始终保持在60°~120°范围,从平均意义看二者实现正交。

图9-9 定子和转子磁通在空间位置
3.速度检测回路
为了检测伺服电动机转子的转速,通常采用测速发电机,也可以用位置检测器测出的信号脉冲数量,通过F/U变换器变换成模拟反馈信号。
在BDCM系统中,一般用交流测速发电机测速,用霍尔元件检测转子位置。也可用一个混合式光电编码器(带磁极定位功能)同时测量速度和定位。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)