您现在的位置是:首页 > PLC技术 > PLC技术
数字PID控制器
![]() 来源:艾特贸易2018-04-28
来源:艾特贸易2018-04-28
简介PID 控制器是应用最广的闭环控制器,有人估计现在有 90% 以上的闭环控制采用 PID 控制器。这是因为 PID 控制器具有不需要被控对象的数学模型、结构简单容易实现、有较强的灵活性和实
PID控制器是应用最广的闭环控制器,有人估计现在有90%以上的闭环控制采用PID控制器。这是因为PID控制器具有不需要被控对象的数学模型、结构简单容易实现、有较强的灵活性和实用性、使用方便等特点。
1.PID控制器在连续控制系统中的表达式
PID控制器的传递函数为
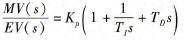
模拟量PID控制器的输出表达式为
 (10-1)
(10-1)
式中控制器的输入量(误差信号)ev(t)=sp(t)-pv(t),其中sp(t)为设定值,pv(t)为过程变量(反馈值);mv(t)是控制器的输出信号,Kp为比例系数,TI和TD分别是积分时间常数和微分时间常数,M是积分部分的初始值。
式(10-1)中等号右边的前3项分别是比例、积分和微分部分,它们分别与误差ev(t)、误差的积分和误差的微分成正比。如果取其中的一项或两项,可以组成P、PD或PI调节器。需要较好的动态品质和较高的稳态精度时,可以选用PI控制方式;控制对象的惯性滞后较大时,应选择PID控制方式。
2.积分部分的近似计算
执行PID控制功能块的时间间隔(即PID控制的采样周期)为Ts,第n次PID运算时的时间为Tsn。因为PID程序运行时Ts为常数,所以可以将t=Tsn时PID的输入量ev(Tsn)简写为ev(n),输出量mv(Tsn)简写为mv(n)。
式(10-1)中的积分对应于图6中曲线ev(t)与坐标轴包围的面积,一般用矩形积分来近似精确积分,每块矩形的面积为ev(jTs)Ts。为了书写方便,将ev(jTs)简写为ev(j),各块矩形的总面积为 。当Ts较小时,积分的误差不大。
。当Ts较小时,积分的误差不大。

图6 积分的近似运算
3.微分部分的近似计算
式(10-1)中的微分用差分来近似,即令

将积分和微分的近似表达式代入式(10-1)中,第n次采样时控制器的输出为
 (10-2)
(10-2)
式中ev(n-1)是第n-1次采样的误差值,上式可以化简为
 (10-3)
(10-3)
式中,KI=KpTs/TI、KD=KpTD/Ts分别是积分系数和微分系数。
在SFB41“CONT_C”(连续控制器)中,Kp、TI、TD和M分别对应于输入参数GAIN、TI、TD和I_ITLVAL。
电动调节阀的控制器用位置传感器检测阀门的开度,通过闭环位置伺服系统,使阀门的开度与阀门控制器的输入信号(即PID控制器的输出)成正比。
式(10-3)的控制器输出值mv(n)与电动调节阀的阀门开度(即阀心的位置)相对应,通常将它称为PID的位置式算法。
4.不完全微分PID
微分的引入可以改善系统的动态性能,但也容易引入高频干扰,为此在微分部分增加一阶惯性滤波,以平缓输出值的剧烈变化。设滤波时间常数为Tf,在SFB41中,Tf对应于微分操作的延迟时间TM_LAG。不完全微分PID的传递函数为
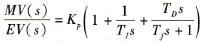 (10-4)
(10-4)
5.死区特性在PID控制器中的应用
在控制系统中,某些执行机构如果频繁动作,会导致小幅振荡,会造成严重的机械磨损。从控制要求来说,很多系统又允许被控量在一定范围内存在误差。带死区的PID控制器(见图7)能防止执行机构的频繁动作。当死区非线性环节的输入量(即误差)的绝对值小于设定值B时,死区非线性的输出量(即PID控制器的输入量)为0,这时PID控制器的输出分量中,比例部分和微分部分为0,积分部分保持不变,因此PID的输出保持不变,PID控制器不起调节作用,系统处于开环状态。当误差的绝对值超过设定值时,开始正常的PID控制。

图7 死区非线性
在SFB41“CONT_C”中,死区宽度DEADB_W相当于图7中的死区设定值B。
在S7-300/400中可以通过使用闭环控制模块、使用闭环控制专用的系统功能块和使用闭环控制软件包等三种方式来实现数字式模拟量闭环控制。在不改变现有设备组成的情况下,我们选择了使用闭环控制专用的系统功能块的方法来实现闭环控制。使用连续PID控制器SFB41、脉冲发生器SFB43、步近PI控制器SFB42等系统功能块来实现闭环控制。
(作者稿费要求:需要高清无水印文章的读者3元每篇,请联系客服,谢谢!在线客服: )
)

点击排行
 PLC编程的基本规则
PLC编程的基本规则